




电话:0519-85516882
手机:17701505582
公司名:常州巴斯光年激光科技有限公司
地址:江苏省常州市天宁区青洋北路143号天宁科技孵化器C座407
在过去的 20 年中,3D激光雷达(也称为LiDAR)确实为传统的相机成像增加了一个额外的维度。最初为测量工作而开发的3D激光雷达,现在已经应用到众多场合,其中最引人注目的应用就是自动驾驶。
尽管有许多不同的激光雷达架构可以归入扫描或闪光的一般类别,但它们都有一个共同点:它们是单色的,类似于黑白相机。正如彩色相机可以提供更多信息一样,增加更多激光雷达波长,可以提供车辆周围环境的更丰富的细节。
通过将典型彩色相机的三个红绿蓝(RGB)波长扩展到几个或多个波长,可以实现主动多光谱或高光谱传感。与被动光谱传感的情况一样,主动多光谱/高光这可用于识别制造物体的材料。对于自动驾驶系统而言,该功能可以显著提高安全性。应用案例包括探测车辆前方很远距离处的道路状况(例如冰或水),以及将人与类似大小的物体区分开来。
迎接挑战
尽管多光谱激光雷达具有明显的优势,但能用于汽车应用的商业系统的开发进展,可能并不会那么迅速,或者并不那么容易。这主要是由于需要实时传感(每秒至少几帧)以及大众汽车市场对尺寸、重量、功率和成本(SWAP-c)的严格限制。此外,多光谱激光雷达还应该提供能与最先进的单色解决方案相媲美的范围和分辨率性能,并能承受行进中车辆上的冲击、振动和温度范围。
多波长激光雷达的早期案例使用可调谐激光光源,主要用于大气研究。然而,即使几十年后,诸如光学参量振荡器之类的可调谐光源,也无法满足前面提到的那些要求。理想的解决方案是:一个激光源能同时产生所有这些需要的波长。在20世纪90年代后期,麻省理工学院林肯实验室首次演示了基于此类光源的紧凑型多光谱激光雷达设备。[1,2]在这些原理验证实验中,使用许多激光脉冲和集成电荷耦合器件(CCD)光谱仪,在每个点上依次采集光谱。这种架构可以在几分钟内,以低分辨率获取单帧。
大约十年后的2012年,使用色散元件、雪崩光电二极管阵列和多通道高速数字化仪的一个宽带光源,展示了能够同时获取八个波长的3D激光雷达。[3]接收到的激光能量除以8,加上接收器路径中的损耗,因此激光雷达的探测范围被限制在20米或更短。此外,该系统包含价值超过十万美元的组件,这导致该设计并不适合广泛应用。在接下来的几年中,业界发表了100多篇关于使用这类器件的科技论文,主要是关于可能实现的不同测量。但基本架构和SWAP-c问题并未改变。
2018年,法国Outsight公司从头开始,开发一种新型多光谱激光雷达(见图1),其应用重点特别侧重在主流的远程激光雷达(数百米)应用。从光源规格的角度来看,这意味着500kHz或更高的脉冲重复频率,几纳秒的脉冲宽度,几微焦的脉冲能量,以及覆盖感兴趣光谱区域的宽光谱。要以视频帧率提供高分辨率点云,则需要高重复频率;要实现良好的距离分辨率,需要短脉冲宽度;并且需要脉冲能量来实现具有中等大小扫描孔径的远程运行。它还应该在外观上非常紧凑,并且可以低成本批量制造。

图1:Outsight公司的多光谱激光雷达,专门针对主流的远程激光雷达(数百米)应用。
现在,基于二极管激光种子源和多个放大级的1550nm人眼安全光纤激光器已经面世。输出可以在合适的非线性光纤中展宽,并且可以满足所有的光学规格。但是这些系统的复杂性和成本仍然阻碍了它们的使用。
Outsight提供的激光器仅由两个关键部件组成:专门设计的微芯片固态激光振荡器,以及提供光谱展宽的单个放大器(见图2)。振荡器由半导体可饱和吸收体(SESAM)被动调Q,以提供1ns脉冲,能量约为100nJ,重复频率为500kHz。这种能量大约比基于二极管的种子激光器的能量高出两个数量级,因此只需要单个放大和光谱展宽级,即可在1400~1700nm范围内产生所需的每个脉冲数微焦耳的输出规格。此外,Outsight的种子源不需要任何高速电子设备来提供短脉冲和高重复频率,这有助于降低复杂性和成本。

图2:Outsight公司的激光器包括专门设计的微芯片固态激光振荡器,以及提供光谱展宽的单个放大器。
开发紧凑、低成本的激光光源,只是挑战的一部分。多光谱激光雷达应该执行更传统的激光雷达任务,即在生成单色点云方面,至少与现有系统一样好。具体来说,它应该以相似的整体系统效率提供等效的最大范围。对于以前的多光谱激光雷达架构,这似乎是不可能实现的。所有早期的设计要么使用色散元件和多个探测器,要么使用带通滤光装置(例如声光滤光器)一次选择一个波长。
在这两种情况下,总激光能量除以光谱带的数量后距离相应减小。为了克服这个看似基本的问题,我们提出了一种新方法:“逆多光谱”。这种方法并不是选择单独的光谱带,而是通过陷波滤波来去除它们。在五个光谱带的情况下,有80%(而不是20%)的激光能量可用于测距。通过在每个波段进行测量,以及在没有移除任何波段的情况下进行测量,我们可以恢复与早期架构完全相同的多光谱信息。
最后的要求是激光雷达能够以视频速率获取点云帧,以便为自动驾驶汽车的控制提供足够信息。从原理上看,多探测器方法可以达到必要的速度,但它存在前面讨论的能量分配问题,以及显著的成本和复杂性问题。相反,应按顺序测量波长或测量缺少的波长。第一种选择是以每个波长对应的固定扫描头角度测量,然后移动到下一个波长。但是在500kHz的激光重复频率下,这将需要极快的陷波滤波机制,并用波长数除以帧速率。
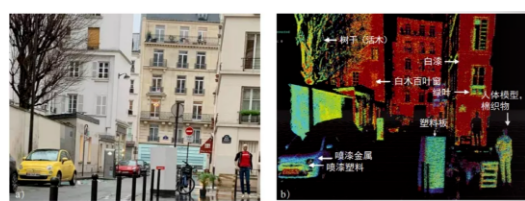
取而代之的是,我们在一个波长下扫描一幅完整的帧,并在帧之间切换波长。通过将这些数据与我们专门的同步定位和映射(SLAM)软件相结合,可以逐帧构建多光谱信息。如果以20Hz的帧率进行扫描,将获得全20Hz的传统3D数据,以及帧率除以波长数的多光谱信息(见图3)。

图3:以20Hz帧率扫描产生全20Hz的传统3D数据(a),以及以帧率除以波长数的多光谱信息(b)。
自动驾驶只是多光谱3D激光雷达的众多应用之一。其他可以从紧凑、低成本的多光谱激光雷达中受益的应用,正在采矿、农业、智能基础设施以及更多不同领域发展。
上一篇:未来已来――盘点元宇宙十大应用 下一篇:重磅 | “专精特新”认定标准全国统一!

电话:0519-85516882 手机:17701505582 网址: www.bsgn-laser.com
地址:江苏省常州市天宁区青洋北路143号天宁科技孵化器C座407
